




Motor subaquàtic de 24V~36V, motor impermeable amb empenyiment de 7kg~9kg
Descripció
El motor sense escombretes submarí SW4025 té una tensió nominal de 24~36 V CC, especialment dissenyat per a drons/robots submarins. Aquest model no té hèlix, els usuaris poden dissenyar la seva pròpia hèlix i fixar-la amb cargols.
Aquest és un motor sense escombretes ordinari, pot ser impulsat per qualsevol controlador ESC de dron ordinari o controlador de motor sense escombretes ordinari.
Forma bonica, llarga vida útil, tecnologia de baix soroll, alta taxa d'estalvi d'energia, alt parell motor i alta precisió.
S'utilitza àmpliament en equips electrònics de precisió, equips d'automatització, equips aquàtics i subaquàtics, drons d'aeronaus modelistes i robots intel·ligents.
Abans de fer una comanda, assegureu-vos que teniu la capacitat de dissenyar l'hèlix.
Paràmetres
| Tipus de motor | Motor sense escombretes subaquàtic |
| Pes | 310 g |
| Empenyiment submarí | 7 kg ~ 9 kg |
| Tensió nominal | 24~36V |
| Valor KV | 200~300 |
| Velocitat de descàrrega | 7000 |
| Potència nominal | 450~800W |
| Corrent carregat | 15~23A |
| Parell nominal | 0,9 N*m |
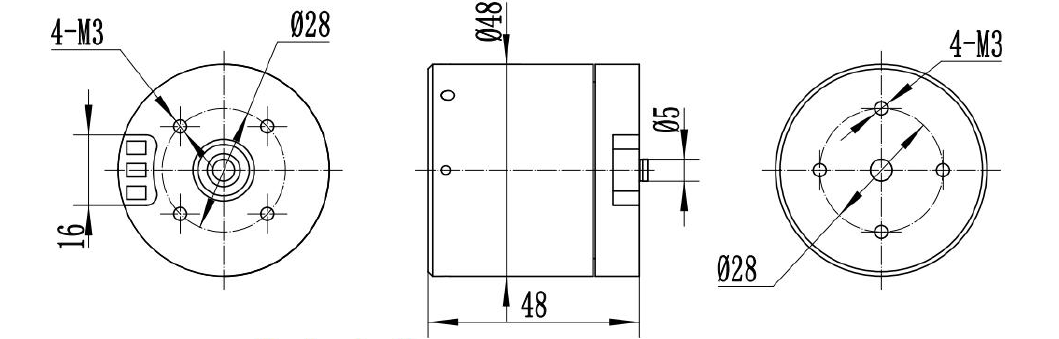
Dibuix de disseny: Forats de cargol a la part superior utilitzats per fixar l'hèlix
Sobre els motors submarins
Com que el motor sense escombretes utilitza commutació electrònica, el funcionament del motor sense escombretes s'ha d'adaptar a la font d'alimentació de CC del voltatge del motor, al controlador (ESC) i al senyal de control de velocitat.
Preneu com a exemple un model comú d'ESC. Primer desconnecteu la font d'alimentació, connecteu els cables del motor i la línia de senyal de velocitat, l'accelerador es desplaça al màxim (cicle de treball complet), connecteu-lo a la font d'alimentació, sentireu dos sons de "caiguda", l'accelerador es desplaça ràpidament a la posició més baixa i, a continuació, podreu sentir el so d'arrencada normal del motor "caiguda ---- caiguda". El calibratge del recorregut de l'accelerador s'ha completat i podeu arrencar el motor normalment. (El mode de funcionament de l'ESC pot ser diferent per a diferents fabricants. Consulteu el manual del model d'ESC corresponent o consulteu el fabricant de l'ESC per obtenir més informació).
Els clients poden utilitzar un ESC (control de velocitat elèctric) de dron normal per impulsar aquest motor.
Només produïm motors i no oferim ESC.
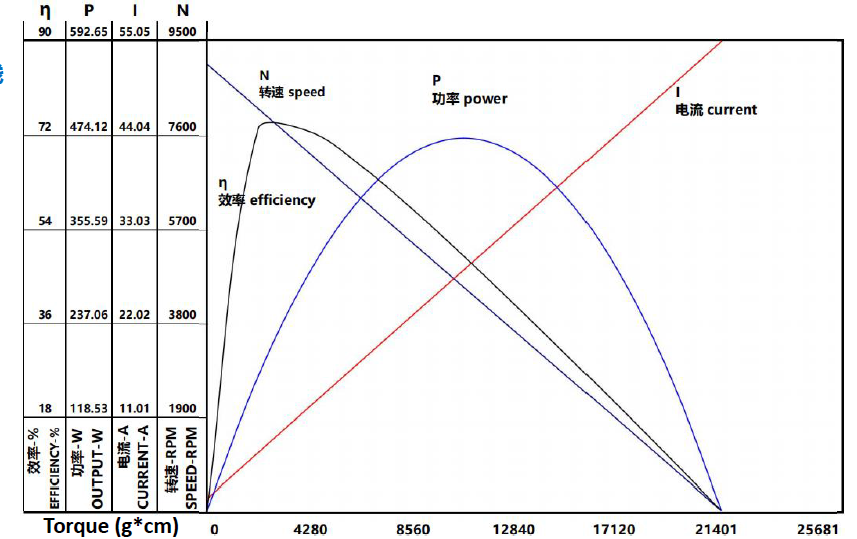
Corba de rendiment del motor SW2216 (16V, 550KV)
Avantatges del motor subaquàtic
1 、 Impermeable i a prova d'humitat per evitar curtcircuits de components elèctrics dins de la cambra.
2. Bloqueig eficaç de pols i partícules per evitar el desgast dels coixinets.
3. Mantingueu la cavitat seca per evitar que el motor i el motor es corroeixin i s'oxidin, cosa que provocaria un contacte deficient o fuites.
Aplicacions
●Instrument electrònic de precisió
●Equips d'automatització
●Equipament subaquàtic
●Model d'avió dron
●Robot intel·ligent
Eix de sortida
1. Mètode de cablejat
En primer lloc, el motor, la font d'alimentació i l'ESC s'han de seleccionar amb precisió segons la càrrega i les condicions d'ús. Una tensió d'alimentació massa alta pot causar danys al motor i a l'ESC. La potència de descàrrega de la font d'alimentació és insuficient per permetre que el motor assoleixi la potència nominal i afectar l'ús de l'efecte. La selecció de l'ESC també ha de coincidir amb la tensió nominal del motor. Els cargols d'instal·lació del motor no han de ser massa llargs per no danyar la bobina del motor. Abans de cablejar, per seguretat, traieu la càrrega del motor, primer connecteu els tres cables de l'ESC i del motor (es poden canviar dos cables per canviar la direcció del motor) i després connecteu la línia de senyal de l'ESC, prestant atenció a l'ordre de cablejat de la línia de senyal, no connecteu la direcció inversa. Finalment, connecteu la font d'alimentació de CC. La polaritat positiva i negativa no es pot invertir. La majoria dels ESC del mercat tenen protecció inversa. Sense protecció inversa, la polaritat positiva i negativa de la font d'alimentació dels ESC corre el risc de cremar-se.
2. Calibratge del recorregut de l'accelerador.
Quan utilitzeu l'ESC per primera vegada, o canvieu la font del senyal PWM, o utilitzeu el senyal de l'accelerador fora de calibratge durant molt de temps, cal calibrar el recorregut de l'accelerador.
Informació sobre el termini de lliurament i l'embalatge
Termini de lliurament de les mostres:
Motors estàndard en estoc: en un termini de 3 dies
Motors estàndard fora d'estoc: en un termini de 15 dies
Productes personalitzats: aproximadament 25~30 dies (segons la complexitat de la personalització)
Termini de lliurament per a la construcció d'un motlle nou: generalment uns 45 dies
Termini de lliurament per a la producció en massa: basat en la quantitat de la comanda
Embalatge
Les mostres s'envasen en una esponja d'escuma amb una caixa de paper, enviades per exprés
Producció en massa, els motors s'envasen en caixes de cartró ondulades amb film transparent a l'exterior. (enviament per via aèria)
Si s'envia per mar, el producte s'embalarà en palets

EmbalatgeMètode i termini de lliurament
| DHL | 3-5 dies laborables |
| UPS | 5-7 dies laborables |
| TNT | 5-7 dies laborables |
| FedEx | 7-9 dies laborables |
| Serveis mèdics d'emergència | 12-15 dies laborables |
| Correus de la Xina | Depèn del país de destinació del vaixell |
| Mar | Depèn del país de destinació del vaixell |

mètode de pagament
| mètode de pagament | Targeta Mastercard | Visat | Compte electrònic | PAGAR MÉS TARD | T/T | PayPal |
| Termini de lliurament de la comanda de mostra | uns 15 dies | |||||
| Termini de lliurament per a comandes a granel | 25-30 dies | |||||
| garantia de qualitat dels productes | 12 mesos | |||||
| Embalatge | Embalatge d'un sol cartró, 500 peces per caixa. | |||||
Envia'ns el teu missatge:
Categories de productes
-

Micromotor pas a pas de 3,3 V i 6 mm de baix soroll i alta qualitat...
-

Eix de cargol M3 bifàsic de 10 mm, engranatge mini pas a pas...
-

Motor de corrent continu N20 amb raspalls i caixa de canvis 1024, sortida...
-

Motor pas a pas d'alta precisió de 42 mm NEMA 17 híbrid...
-

Motor pas a pas de baix soroll amb imant permanent de 50 mm de diàmetre...
-

Motor pas a pas híbrid NEMA 23 d'alt parell de 57 mm m...